Politici reagujú na Huliakov experiment s rastlinkou a dymom. „Lepšie z toho rastie,“ tvrdí poslanec





Z Newfounlandu až do Írska, to je trasa, ktorú má robotická plachetnica prejsť. Ide o cca 3000 km plavby po oceáne, kde na ňu striehnu nástrahy vo forme búrok, silného vetra, zlyhania elektroniky či zvedavých kapitánov, ktorí podobné prístroje vyťahujú z vody.
Andrej Osuský, vymyslel, vyrobil a vypustil svoju robotickú plachetnicu na vlny oceánu. O tom, prečo si vybral ako plavidlo plachetnicu, aké materiály použil pri jej stavbe a akými spôsobmi testoval ich odolnosť sa dočíitaš v rozhovore. Andrej tiež prezradil, ako funguje riadenie a aj jeho predpoklad, či sa plachetnica dostane do cieľa.
Plachetnicu som vypustil v pondelok 12. septembra. Samotné vypustenie plachetnice bolo oveľa náročnejšie, než som čakal. Hlavne preto, že som na všetko bol sám a veľa som sa pri tom musel naučiť, napríklad šoférovať dodávku. Ľudia, ktorých som náhodne oslovil, boli veľmi ochotní. Jeden z rybárov bol mojou plachetnicou fascinovaný a pomohol mi ju poskladať. Ďalší ma viezol po prístavoch a pomáhal mi hľadať rybárov. Bol som prekvapený, koľko taxikárov vie o dvoch robotických plachetniciach. O tej, ktorú nedávno vypustil početný kanadský univerzitný tím, sa dozvedeli v rádiu. O tej mojej sa šírili klebety. Plachetnicu sme prehodili cez palubu rybárskej lode asi 5 kilometrov od brehu. Plachetnica sa krátko po vypustení otočila správnym smerom a vyslala prvý signál. Bol som spokojný, že je všetko v poriadku a plachetnica sa rýchlo stratila z dohľadu.
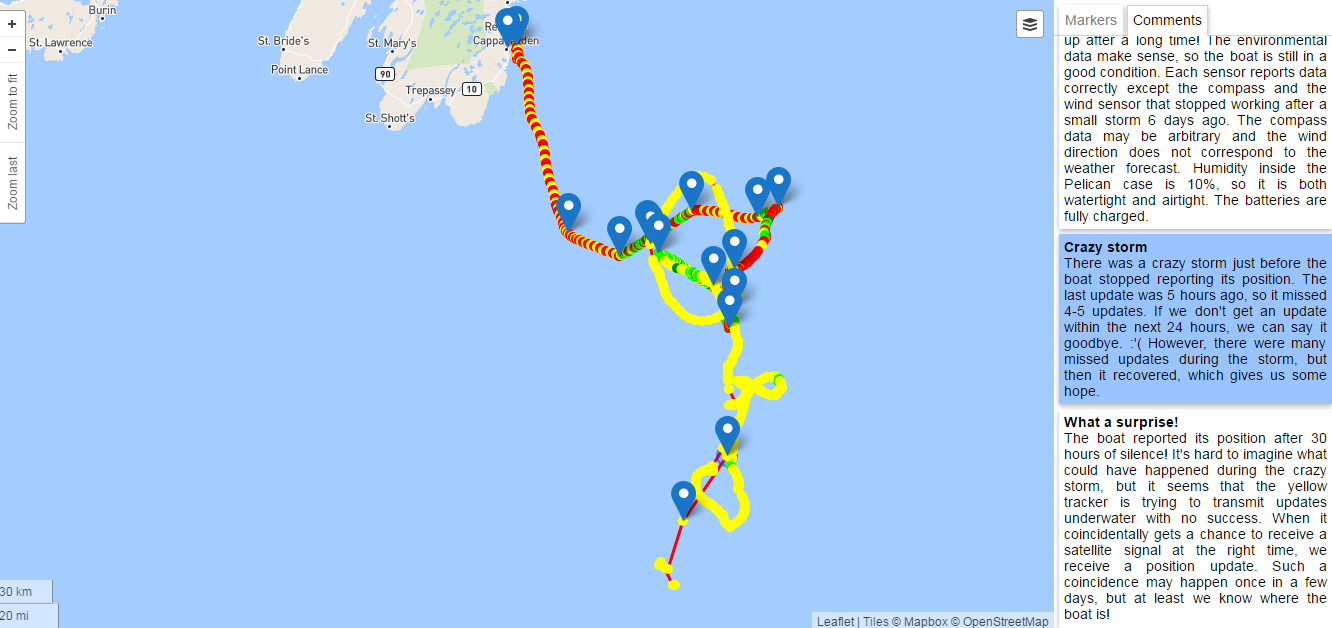
Až keď som sa za tmy vrátil domov, poskytol sa mi desivý obraz na mape – loď podľa súradníc zmenila smer a narážala do skál. V tej chvíli som nemohol nič robiť len počkať do zajtra. Loď sa medzitým vzdialila a jej naháňanie by bolo príliš drahé. Za dva dni sa sama opravila a s krátkymi prestávkami smerovala správne – do Írska. No dlho to nevydržalo a odvtedy sa loď motá podľa toho, ako fúka vietor. Pravdepodobnou príčinou tohto správania je zlyhanie časovača, ktorý má resetnúť loď do troch minút, ak hlavný program nefunguje správne, a takisto aspoň raz za osem hodín. Problém je, že energia uložená v kondenzátoroch chvíľu poháňa elektroniku, kým je zdroj odpojený a procesor sa nestihne resetnúť. Takýto prípad som zaznamenal deň pred vypustením lode, ale neprikladal som mu význam, pretože resetovanie lode som mal mnohokrát otestované. Jediná vec, ktorú som na Newfoundlande menil, bol servomotor, a možno to bol kameň úrazu.

Počas výšky som súťažil s robotmi v bludisku na Istrobote a veľmi ma to bavilo, takže som zvykol vyhrávať prvé alebo druhé miesto. Posledné štyri roky som sa veľa motal okolo oceánu – s nejakými prestávkami som žil na Kanárskych ostrovoch a na Mauríciu. Začal som sa tam potápať, jazdiť na motorovom člne a vyrábať si hobby ponorku. Hľadal som však nejakú veľkú výzvu a narazil som na Microtransat Challenge, ktorej cieľom je prejsť Atlantický oceán autonómnou loďou. Keď som sa naivne opýtal organizátorov, či je táto súťaž len pre študentov, dostal som odpoveď, že ešte sa to nikomu nepodarilo. Neveril som tomu a po chvíli hľadania som zistil, že už desaťročie sa o to pokúšajú tímy z celého sveta a priemerná životnosť lode je niekoľko dní. Ešte neuveriteľnejšie je, že na tom pohorela aj bohatá (desiatky miliónov USD) komerčná spoločnost, ktorá robotické plachetnice vyrába. Ukazuje sa, že je jedno, koľko ľudí a koľko rokov na tom pracuje alebo koľko na to majú peňazí, výsledok je zhruba rovnaký. Aby som zistil, v čom je zádrheľ, rozhodol som sa to skúsiť.
Pôvodne som začal robiť motorovú loď,pretože som sa nechal ovplyvniť sériou argumentov o komplikovanosti plachetnice. Avšak ako vidieť na pokusoch s motorovými loďami, jedna za druhou zlyháva presne na tom istom – motor sa zamotáva do rias. Nakoniec som sa rozhodol pre plachetnicu. Plachetnica nie je až tak závislá od slnka ako motorová loď a pohybuje sa rýchlejšie.
Plachetnicu som začal vyrábať v marci a stihol som ju aj s niekoľkými nepodarkami za šesť mesiacov. Pritom som prvýkrát programoval Arduino, prvýkrát som držal v ruke karbobrúsku a prvýkrát som pracoval s laminátom, takže väčšinu času som sa učil.
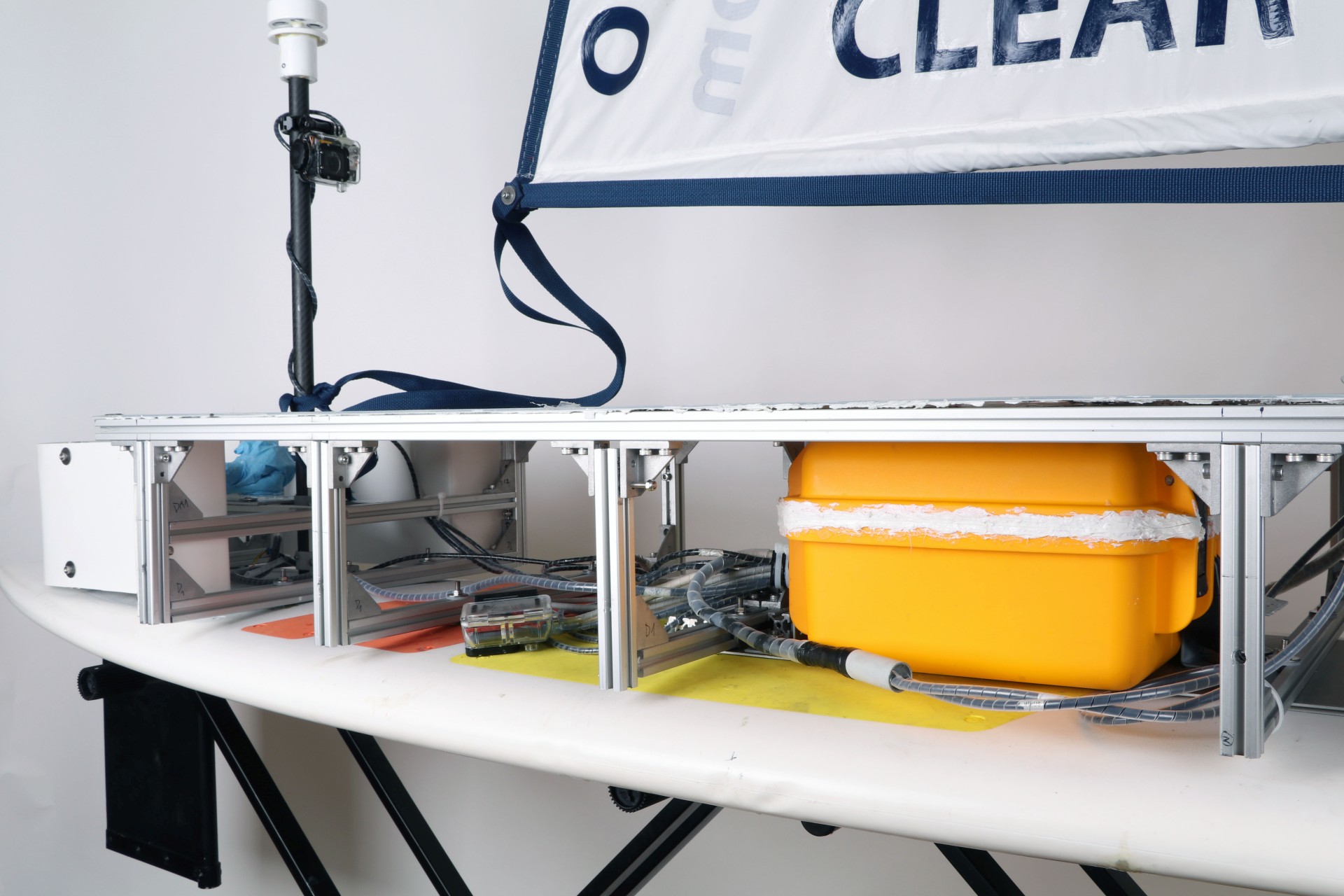
Dôležité su senzory, ktoré zbierajú dáta pre navigáciu ako GPS, kompas a senzor vetra. Loď je poháňaná vetrom fúkajúcim do plachty a pred vypustením som pridal malú prednú plachtu, ktorá loď urýchľuje. Plaváky po bokoch ju stabilizujú a ťažký kýl s olovenými závažiami bráni jej prevráteniu. Kormidlo je poháňané servomotorom, ktorý nastavuje riadiaca jednotka. Tá je postavená na platforme Arduino, nachádza sa vo vodotesnom kufri spolu so zdrojom a solárnym regulátorom. Batérie sú nabíjané 100 W solárnym panelom. Loď je vybavená aj senzormi teploty a vlhkosti a tie sa spolu s aktuálnou polohou vysielajú cez satelitnú sieť Iridium. Okrem toho má loď ďalšie dva vysielače cez konkurenčnú sieť Globalstar, aby sme poznali jej polohu. Na lodi je aj kamera, ktorá natáča video vo Full HD kvalite. Keďže kapacita je obmedzená na 128 GB, natočí sa každú hodinu len 30 sekúnd.
Použil som pevné a nekorozívne materiály. Základ tvorí surf, ktorý je spevnený plechom proti zlomeniu a naň je primontovaná konštrukcia z hliníkových profilov. Po bokoch sú plaváky z polystyrénu obaleného sklolaminátom. Loď je zaťažená kýlom s olovenými závažiami, aby sa po prevrátení otočila nazad. Plachta je z takzvaného netrhavého nylonu, z ktorého sa vyrábajú napríklad padáky a stany, a lemovaná je nylonovým popruhom. Plachta je prišitá na konštrukcii z karbónových rúriek. Elektronika je uzavretá v kufri Pelican a dvoch polykarbonátových krabiciach.
Všetky materiály som testoval tak, že som ich namočil do slanej vody aspoň na mesiac a pokúšal sa ich všemožne zlomiť. Niektoré veci som vtipne vyriešil, napríklad servomotor som zabalil do latexovej rukavice naplnenej silikónovou masťou, čím je dosiahnuté dokonalé tesnenie. Musel som vyskúšať veľa druhov lepidiel a spôsobov tesnenia, kým som našiel tie správne.

Na základe GPS a kompasu pozná plachetnica svoju polohu a smer. O zistenie smeru vetra sa stará tzv. ultrazvukový anemometer. V pamäti je uložený zoznam bodov, cez ktoré má prejsť s danou presnosťou. Riadiaca jednotka tieto dáta vyhodnotí a vypočíta odchýlku od žiadaného smeru a snaží sa ho skorigovať kormidlom. Algoritmus kormidlovania je pomerne sofistikovaný, pretože dôraz je kladený na šetrenie servomotora na úkor rýchlosti a presnosti. Kormidlo robí krátke pohyby a sleduje odozvu, až kým loď neskonverguje správnym smerom. Správne kormidlovanie sme videli počas dvoch dní, keď prvýkrát nabehol hlavný softvér (na mape sa objavili zelené body). Plachta má fixnú maximálnu polohu na jednu alebo na druhú stranu, aby som celú vec zjednodušil. Jej tvar bol špeciálne vypočítaný, aby loď bolo možné riadiť len kormidlom. Smer vetra je podstatný len v prípade, keď fúka oproti alebo takmer oproti. Vtedy sa zvolí iný algoritmus.
Pri tomto pokuse to vyzerá na večnosť. Teraz ide o to, aby sa loď nestratila a dostala sa na akékoľvek pobrežie pre jej nájdenie a preskúmanie.
Obával som sa, že najslabším článkom na lodi je servomotor otáčajúci kormidlom, ale napokon sa loď pokazila tak, ako som nečakal.
Je jasné, že táto plachetnica už do cieľa nedorazí. Loď má časovač, ktorý kontroluje beh programu a resetne všetky komponenty v prípade problémov. Len problém je, že nič nekontroluje ten časovač.
Okrem hardvérového a softvérového časovača a backup plánu pri poškodení pamäte je vybavená niekoľkými nezávislými trackermi, ktoré umožňujú loď vystopovať pri zlyhaní hlavného programu alebo poškodení solárneho panelu. Na mape sú vyznačené zelenou, červenou a žltou. Videli sme však pomalé umieranie v priamom prenose, kedy trackery odchádzali v tomto poradí a vždy tomu predchádzala nejaká búrka. Ukazuje sa, že nehostinné prostredie severného Atlantiku v tomto ročnom období bolo podcenené. Čo sa udialo, sa môžeme dozvedieť, až keď budem mať možnosť loď vyloviť.
Ak aj táto loď prejde oceán, nedá sa to nazvať víťazstvom. Jeden takýto vrak už pláva uprostred Atlantiku, občas sa ozve a pravdepodobne vypláva na pobrežie Európy alebo Afriky ako mŕtva ryba. Pravidlá Microtransat Challenge sú nastavené tak, aby vyhrala loď, ktorá skutočne zvládne celú cestu. Jednou z najťažších podmienok je, aby loď trafila cieľ s presnosťou 25 kilometrov, čo sa dá splniť len s perfektne funkčnou loďou, ktorá hravo prepláva oceán. Vylučuje sa tým loď, ktorú na pol cesty donesú len oceánske prúdy. Takže táto loď je skôr experimentom, kde sa vyjasňuje veľa vecí, na ktorých treba popracovať. Úspechom projektu ako takého som si však celom istý. Možno to nebude druhá ani tretia loď, ale niekedy bude misia splnená.
Loď nás už niekoľkokrát prekvapila. Keď sa na začiatku zdalo, že úplne zlyhala, zrazu vyslala detailné informácie o svojom stave a správne sa nasmerovala. Krátko po úvahe vyloviť nefunkčnú loď som začal veriť tomu, že sa dostane do Írska. Po búrke odišiel kompas, potom sa zase opravil a potom definitívne odišiel. Po poslednej silnej búrke odišiel posledný tracker a po 30 hodinách sa loď, ktorú som už pochoval, ozvala.
Na danej stránke píšem komentáre, čo sa deje a hoci loď viac nefunguje ako funguje, niekedy sú to vzrušujúce okamihy. Akoby loď zápasila so svojím osudom.
Posielanie dát cez satelitné pripojenie je veľmi drahé a jediný obrázok môže vyjsť na stovky dolárov. Odhliadnuc od toho, že zariadenie na rýchlejší internet stojí tisíce. Záber sa ukladá na SD karte a sú to pre mňa veľmi cenné dáta, pretože sa dozviem, čo sa stalo. Na základe toho môžem vyrobiť lepšiu loď. Aj preto je kľúčové, aby sa loď na oceáne nestratila a získal som tie dáta.
Prezradím však, že experimentujem so starým satelitným telefónom a je dosť možné, že pri ďalšom pokuse budem malé obrázky z bojiska posielať na povel a následne ich budem publikovať.
Každý pokus bol unikátny. Mnohokrát sa loď navždy stratila a nikto nemal možnosť dozvedieť sa príčinu zlyhania, preto táto vec ostáva tajomstvom. Oceán je nehostinné prostredie a aj keď nejaká loď prešla úctyhodnú vzdialenosť, bolo to len preto, že ju nezasiahla búrka. Tá potom prišla a skolila ju. Často bola slabým článkom mechanická konštrukcia, pokiaľ neboli problémy s elektronikou, tesnením a softvérom. Ja som loď vypustil v najmenej vhodnom období, kedy sa búrky menia na hurikány, nechcem sa spoliehať na to, že loď bude mať celú cestu „ustlané“. Cieľom je vyrobiť loď, ktorá prejde oceán za akýchkoľvek podmienok.
Myslím, že rozdiel od iných mám v prístupe. Mojou snahou bolo najprv vyrobiť mechanicky robustnú loď čo najrýchlejšie, bez zložitej výroby a bez zdržania ju pustiť do vody, pretože len tak sa dozviem, čo funguje a čo treba vylepšiť. Obdivujem tých, ktorí to skúšajú každý rok s drobnými vylepšeniami, ale mnohí na to idú ako na hotovú vec – ideme prví prejsť oceán. Stokrát to odložia, pretože to ešte nie je dokonalé a až po množstve testovaní pustia loď na oceán za veľkých fanfár. A tam aj za pár dní skončí. Tak vidíme projekty, ktoré začali dobre, ale bohužiaľ rýchlo skončili alebo spomalili. Preto si myslím, že je za tým fundamentálnejší problém spoločnosti, ktorý je likvidačný – tlak na úspech a strach zo zlyhania.
Tento projekt je behom na dlhú trať, ale popri ceste dostávam aj iné nápady a zatiaľ neviem, kde začať. Ak aj loď raz prejde oceán, smerovanie projektu OpenTransat sa môže vykryštalizovať až za 10 rokov. Inými slovami, netuším, čo z toho bude, ale verím, že niekam sa to posunie a bude to niečo ešte zaujímavejšie než samotné prejdenie oceánu. Technológie budú napredovať, objavia sa nové materiály, nová digitálna výroba, satelitné pripojenie sa stane lacnejším a raz budeme vidieť desiatky podobných lodí, ktoré prejdú oceán. K takému vývoju je však potrebné, aby niekto začal publikovať svoju prácu a pomohol ostatným so spoločným cieľom. Slovíčko “Open” v názve značí, že všetok softvér, hardvér a dizajn zverejním, nech ho každý použije tak, ako chce. A zároveň každý nech zverejní to, čo na tom postavil. Publikovať začnem hneď ako odstránim súčasné nedostatky riadiacej elektroniky, ale zverejním aj chyby, nech sa nemusia opakovať.
Cieľom je vytvoriť komunitu, ktorá bude stavať na otvorenom návrhu a spoločnými silami prispieť k vývoju robotických lodí a následne k výskumu oceánu. Ukazuje sa to ako dobrá cesta. Dostal som feedback zo zahraničia od skúsenejších inžinierov a jeden Slovák ma milo prekvapil tým, že naprogramoval lepšiu trackovaciu mapu, ktorou sa chystám nahradiť súčasnú.
Ďakujem za rozhovor a inšpiráciu.
fotografie: archív Andrej Osuský, track.opentransat.com





Táto funkcia je dostupná iba členom StartitUp PREMIUM. Skopíruj špeciálny odkaz a zdieľaj obsah so svojimi kamošmi.
Tento obsah je štandardne platený, no tvoj kamoš je členom StartitUp PREMIUM a obsah ti odomkol. Stačí zadať tvoju emailovú adresu.



{kind=link}